-
快停按照参数P0.69的减速时间来停止,急停会断开使能,同时会有报警信号输出,按照P4.30设置的模式停止。
-
3秒
-
注意ABZ信号接线和直线电机的地线,ABZ信号不能缺少,否则会报ER02-2编码器断线故障
-
DA200系列手动JOG时电机为什么不转 ?确认伺服驱动器的系统状态处于准备好状态,确认输入电压正常,无故障。伺服处于使能状态,最简单的方法是用手转动电机轴来确认,点动JOG只能在未使能的状态下运行。
-
QDA200系列脉冲指令结束电机仍在运行是什么原因?两种可能原因: (1)位置指令平滑滤波P0.33或位置指令FIR参数P0.34设置过大,脉冲指令发送结束后,滤波函数中的遗留指令脉冲未执行完成。(2)位置指令速度过大,伺服电机运行到最高限制转速,导致指令严重滞后可通过ServoPlorer上位机软件内置示波器功能监测指令脉冲 ...
-
问题1:丝杆类负载,伺服跑起来太“软”可能原因:惯量 没有识别,刚性 设置太低问题2:伺服跑起来有抖动,有异响可能原因:惯量 没有识别或 刚性 设置太高
-
出现这种请况需要把开关量滤波P3.43设为50断电重启处理。
-
由于驱动器硬件上的更改,DA180不支持增量式编码器电机,只支持绝对值光编和绝对值磁编编码器。
-
1、电机相序测量:使能功能码P8.81相序测试,测试结束后观察P8.06相序结果,若为逆序则需要调换电机动力线相序,DA200不允许负序运行。2、测试初始角:脱开负载后设置P4.96为1,学习初始角完成后查看P8.19(编码器偏置角),初始角不对可能导致电机使能飞车或出力不够报18-0. ...
-
可以通过调整伺服P0.99参数为30滤波参数来减少转速波动,或者选用分辨率更高的编码器。
-
DA200系列选择伺服电机大小时需要考虑哪些因素?主要有以下四点:(1)连续工作扭矩 < 电机额定扭矩;(2)加速时扭矩 < 电机最大扭矩;(3)负载惯量 < 3~5倍电机转子惯量;(4)连续工作速度 < 电机额定转速。 ...
-
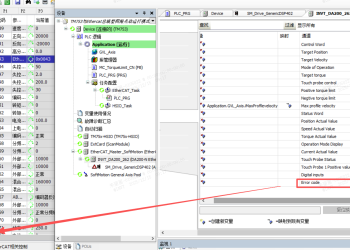
如下图所示:
-
-
6040只能复位可清除故障,查看说明书故障说明;可通过通讯4.90尝试清除。
-
1、检查线路以及接地是否正确。
2、P4.92恢复出厂设置以后,确认P9.50驱动器型号和P0.00电机型号。
3、在设置好电子齿轮比或单圈脉冲数、惯量比、刚性、制动过载检测等数值后,先点动JOG观察电机有无异常。
4、无异常后,在进行相关通讯参数的设置。 ...
-
不支持,运动控制的功能块需要按照前面部分自己编写或者参考我们的示例工程;我司D0型驱动支持102、105、111等报文。
-
P3.00设置为相反有效状态例如003改为103,反之亦然。关管后设置P0.05点动速度,保证P0.10不为0.
-
在用万用表测量时,正常相差±5V,相差几十V是检测出问题,相差一半是驱动器功率代码没设置对。
-
19-0为过速故障。CANopen通讯应用:扭矩切换位置模式时报出19-0:波形查看电机转速超过6000rpm,实际波形观测P4.12总线位置指令,10ms发出475186个脉冲,一圈脉冲数10000建议修改程序位置指令,适当增加加减速时间
-
上位机ServoPlorer 设置参数或者监控参数页面双击参数行,弹出窗口标题栏会显示Modbus地址;DA200说明书会有参数的Modbus地址。
 关于DA200-N通过总线驱动器通过参数0x400014 人气#通用伺服系统
关于DA200-N通过总线驱动器通过参数0x400014 人气#通用伺服系统 DA200-N伺服面板查看故障记录报警代码是Er246 人气#通用伺服系统
DA200-N伺服面板查看故障记录报警代码是Er246 人气#通用伺服系统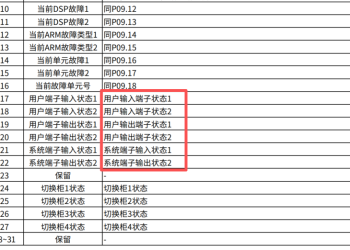 GD5000 profibus DP通信报文给定值和实际值534 人气#高压变频器
GD5000 profibus DP通信报文给定值和实际值534 人气#高压变频器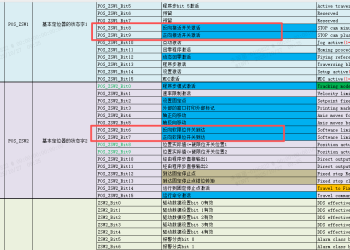 DA200A-F驱动器的111报文如何读取硬件限位1117 人气#通用伺服系统
DA200A-F驱动器的111报文如何读取硬件限位1117 人气#通用伺服系统