-
上电的时候,控制器或者IO点给了使能信号。
-
现在FPGA固件版本1.24/2.24版本,在刷写ARM软件时可以不用短接CN6端子6和9脚。在驱动器上电初始化时,同时用手指按住驱动器面板最左边三个键即可进入刷机状态,然后进行烧写Hex文件。
-
跳闸分两种情况,上电瞬间跳闸和上电使能后再跳闸;1、上电瞬间跳闸:针对小功率5.5kW以下通常是由于并联了多台驱动器一起上电导致,目前可大致按每台4mA算;针对中功率有一个C3滤波器会大幅增加上电漏电流,可拔掉底层白色跳线帽J10;还有可能是因为制动电阻(包括内置和外置)发热厉害烧坏以后导致内部电阻丝膨胀与外壳PE ...
-
P3组开关量输入设置急停并且P3.41急停开关屏蔽改为正常
-
需要把DI输入点P3.00-P3.09其中一个参数设置成速度指令符号(0X00E),还有P0.41设置成S-SIGN 有效
-
总线型和脉冲型5.5KW以下不标配STO功能,需要定制
-
编码器Z信号短接正负,能避免Z信号的干扰。
-
a. 首先判断是否是机械原因导致的设备卡死或者接线是否存在缺项短路(可以断电后手动去推设备看是否可以推动),若推不动,大概率为机械原因导致的卡死,检查机器找到导致卡死的问题排出即可。若不是则需要找其他原因。b. 排出机械原因,(有减速机)可查看减速机,在手动模式下听减速机是否有异响出现,也有可能 ...
-
P3组开关量功能设置 P3.40设置行程限位开关正常
-
1.将驱动器段的编码器线拔掉,查看屏幕是否还会出现6个0的情况,如果还有则需要更换驱动器,如果没有出现,大概率为编码器线存在短路的情况,现场如果有条件可以更换编码器线做交叉验证。
-
<N_FB_V1.0.0.0>配合V2.62版本使用;用于V2.63版本时须将FB1功能块中静态变量CW_8删除,程序段1中CW_8删除,同时OB1块更新块调用。
-
是英威腾为了满足行业市场与用户需求,以助力用户产业升级为出发点。倾力打造的行业明星产品。领先的控制性能与行业需求结合只为激发伺服系统与应用环境的完美结合
-
可以考虑是伺服驱动器以及硬件问题。
-
P0.70绝对值编码器方式设置成多圈绝对值功能 P0.71多圈绝对值清零即可
-
实现方式1-伺服内部点动功能1.在各种模式下均可以使用;使用时伺服内部切换成速度环,点动结束退回原来环路;2.将P4.80-P4.81设置为点动命令(地址2860)和P0.05点动速度(地址1010);3.保存参数并复位;4.通过cw控制字中的使能或者其他使能来源断开使能;5.通过PZD设置点动速度(只能是正数,且在1000rpm以下);6.通过PZD参数 ...
-
响应频率2.0kHZ,高动态响应频率缩短整定时间,最大限度发挥高端机械性能
-
1、上电使能不给运行指令,电机静止状态检察输出电压,超过10伏IGBT存在问题;2、检测运行数据确认是否过载,主要监控电流,电压利用率,负载率。
-
P2.10速度前馈增益增大 可减小滞留脉冲 提高响应速度
-
一般伺服都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式。速度控制和转矩控制一般都是用模拟量来控制的,位置控制是通过发脉冲来控制的,具体采用什么控制方式要根据工艺的要求,满足何种运动功能来选择。如果对电机的速度、位置都没有要求,只要输出一个恒转矩,当然是用转矩模式。伺服的基本概念是准确、精 ...
-
23位高精度编码器定位更精准扶贫低速加工更平稳,加工表面更光洁
 GD5000 profibus DP通信报文给定值和实际值391 人气#高压变频器
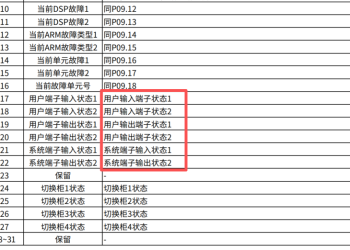
GD5000 profibus DP通信报文给定值和实际值391 人气#高压变频器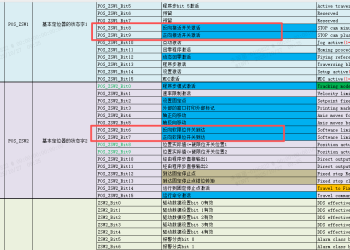 DA200A-F驱动器的111报文如何读取硬件限位1035 人气#通用伺服系统
DA200A-F驱动器的111报文如何读取硬件限位1035 人气#通用伺服系统 谁会搞,付费1367 人气#变频器
谁会搞,付费1367 人气#变频器 GD200A控制面板连锁配电柜4根线被拆,无法1147 人气#低压通用变频器
GD200A控制面板连锁配电柜4根线被拆,无法1147 人气#低压通用变频器