-
1、控制模式选择P0.03设为12、速度指令选择P0.40设为03、内部速度1通过485设置4、外部使能信号接入到DI0
-
右键EtherCAT_Master_SoftMotion选择扫描设备查询,将查询结果和实际比较
-
第三种,只需要给驱动器一路脉冲信号,电机正反向运行由一路方向IO信号确定。这种控制方式控制更加简单,高速脉冲口资源占用也最少。在一般的小型系统中,可以优先选用这种方式。
-
故障现象:最后一台伺服报err24-11问题;故障分析:使能驱动后检测到网线未插好。解决方法:排查参数发现,p3.00为103使能io端子使能导致。更改为003后断电重启解决。
-
1、首先拆除电机电缆,如果驱动器仍有故障,需更换驱动器。2、测量电机三项间电阻,检查电机是否完好。3、降低P0.12的值
-
P5.16设为0,回原无动作
-
可以在线访问时设置对应的设备名称,下载程序后,IP地址会自动根据设备名称对应。
-
一般来说伺服电机和步进马达等相比,能从低速到高速保持一定的转矩输出,没有象普通步进点饥那样的振动、噪音、发热等问题的存在,没有拖控(不能控制的状态)现象,电机速度平滑。
-
有以下三种
-
故障现象:R0.07显示母线电压680V;故障分析:测量实际母线电压,查看是否有非标硬件版本,确定伺服驱动器参数是否正常。解决方法:修改p9.50解决。
-
不可以,伺服为闭环控制系统,必须正确连接电机编码器,如果不接编码器伺服驱动器会报相应故障
-
PZD报文格式速度反馈是个16位整形数据,关联的R0.21瞬时速度,读取时是个整数,会省略小数位。如果想精确的显示小数位,可以单独修改PZD反馈参数,例如R0.00当前转速,转化为实型,除于10.0显示出来。
-
Er07-0(再生制动放电过载故障):伺服系统制动电阻放电平均功率大于内部设定值。1.制动电阻功率较小,如果之前使用的是内置制动电阻,可选择功率更大的外接制动电阻并且必须重新设置相关参数P4.34(制动过载检测选择)设为2(外接),P0.13(外接制动电阻功率)和P0.14(外接制动电阻阻值)按实际值设定; 2.电机转速 ...
-
DA200和DA180区别:DA200抱闸信号线默认D05,DA180需要p3.14改为0,p3.13改为5,DO4为抱闸信号端子。
-
伺服系统最初用于国防军工, 如火炮的控制, 船舰、飞机的自动驾驶,导弹发射等,后来逐渐推广到国民经济的许多部门,如自动机床、无线跟踪控制等
-
故障现象:3KW电机运行抖动;故障分析:用上位机排查实际转速、指令转速、电流、电压和滞留脉冲等实际数据,发现电机惯量大运行转矩抖动大。解决方法:降低刚性,加大惯量比。
-
报警机制:●1.使用多圈绝对值编码器时才会报此故障;●2.编码器电池电压介于3.0V~3.2V之间时只报Er02-8,电机多圈数据不会丢失,驱动器还能够正常使能运行,电池低压之前即便伺服一直带电未曾下过电也会报出此警告;●3.编码器电池电压介于2.5V~3V之间时,若伺服一直带电不下电只报Er02-8,伺服多圈数据不会丢失,能够正常 ...
-
需要查看P9.50驱动器型号和P0.00电机码是否正确
-
首先将P0.02设置为0,P0.25-P0.29参数才能生效。而后更加客户现场要求,确定好每毫米或微米的脉冲量,根据现场机械规格找到丝杆螺距Pb进给量,如果使用了减速机需要确定好减速比n,确定好使用的编码器的分辨率,之后根据公式计算出电子齿轮比的分子和分母。 ...
-
英威腾伺服常用监控参数表
 关于DA200-N通过总线驱动器通过参数0x400014 人气#通用伺服系统
关于DA200-N通过总线驱动器通过参数0x400014 人气#通用伺服系统 DA200-N伺服面板查看故障记录报警代码是Er246 人气#通用伺服系统
DA200-N伺服面板查看故障记录报警代码是Er246 人气#通用伺服系统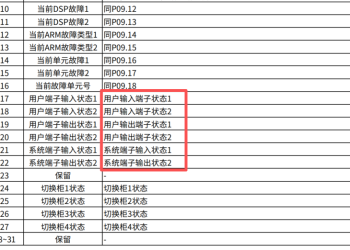 GD5000 profibus DP通信报文给定值和实际值534 人气#高压变频器
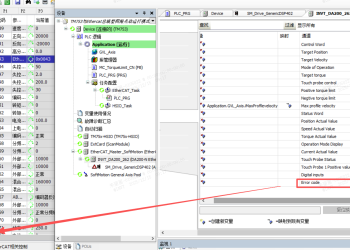
GD5000 profibus DP通信报文给定值和实际值534 人气#高压变频器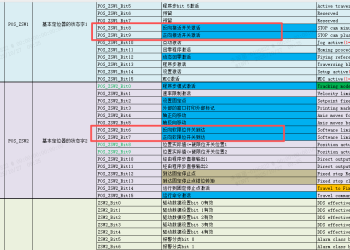 DA200A-F驱动器的111报文如何读取硬件限位1117 人气#通用伺服系统
DA200A-F驱动器的111报文如何读取硬件限位1117 人气#通用伺服系统