-
可以使用多圈绝对值电机,使用伺服位置-速度模式,位置模式使用伺服刀塔功能就近原则回固定原点位置,因为电机一个方向运行,为避免编码器数据溢出更改为超多圈模式。速度模式选择模拟量为指令来源。动作流程为上电后触发刀塔反转,伺服回到固定起始点位置,然后切换到速度模式,通过给定模拟量电压伺服开始加工,加工结束 ...
-
IPM故障( Er01-5 )
驱动器实际输出电流超过规定值:①驱动器故障(驱动电路、IGBT故障)。②电机电缆U、V、W短路、电机电缆接地或接触不良。③ 电机烧毁。④电机线U、V、W相序接反。⑤参数不合适导致系统发散。⑥起停过程加减速时间太短。⑦瞬间负载过大。 ...
-
将ModePos模式切换与Execute动作触发不要在同一个PLC扫描周期内进行,ModPos切换到新模式后建议延迟10ms以上再触发Execute命令,在 Control_table 中,将"ConfigEpos"设置为 3。
并且动作触发Execute的高电平保持时间不能太短,建议保持10ms以上。 ...
-
通过P4.96学习磁极角,通过P8.19查看
-
负载率(dutycycle)是指电机在每个工作周期内的工作时间/(工作时间+非工作时间)的比率。如果负载率低,就允许电机以3倍连续电流短时间运行,从而比额定连续运行时产生更大的力量。
-
落到位置不圆其他位置圆弧可以,需要缩短加减速时间。画圆为椭圆时,确认惯量无问题,提升电机的刚性提升相应能力,一般刚性在15,惯量在500左右
-
伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。
-
伺服电机与普通电机最大的区别在于电机转子和反馈装置。伺服电机转子表面贴有强力磁钢片,因此可以通过定子线圈产生的磁场精确控制转子的位置,并且加减速特性远高于普通电机。反馈装置可以精确反馈电机转子位置到伺服驱动器,伺服电机常用的反馈装置有光学编码器、旋转变压器等。 ...
-
三种情况:第一种在伺服断电情况下因为插拔电机侧编码器插头或者电池原因低于3V欠压,在重新上电后驱动器出现Er02-9提示;第二种因更换驱动器原因,因为原点偏移量清零导致的原点位置变化;第三种情况因为运行工况原因,电机只能一个方向一直运行,当运行一段时间后多圈编码器的圈数会溢出,导致驱动器断电重启后位置发生变 ...
-
英威腾直流电机是通过齿轮与减速齿轮组相连接当电机旋转时,这个电位器的阻值也将发生变化所以控制电路就能精确的调整旋转量与旋转方向
-
不带,目前抱闸最大到200多个牛米,选择抱闸时一般要额定扭矩的1.2倍。做不到1.2倍,用起来是有风险的,所以就不配抱闸。
-
不支持,旋变需选-E7/S7
-
这类缺项的问题,首先排查电机动力线,重新插拔驱动器和电机端的动力线插头。偶尔报警可通过参数P4.77=0进行屏蔽报警长时间存在,建议使用万用表测量动力线是否导通良好。我司人员在现场,可优先测量我司伺服和电机是否异常,优先排查我方问题。现场有动力线,更换新的测试是最快最简单有效的方式。 ...
-
1.驱动器UVW动力线未连接、缺相、相序错误,会报此故障 2.编码器初始角错误,可将P4.96(编码器初始角测试)设为1,重测后看看P8.19(编码器偏置角)与之前是否差别很大3.负载太大,异常卡死等导致;可考虑更换大规格的驱动器和电机4.电机实际转速过 ...
-
、对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制非常灵活方便。
-
ER02-7是编码器的故障,驱动器只读出来,只能通过软件屏蔽或者更换一台电机。目前2.65版本默认屏蔽该故障。
-
如果上位机没有设定6060运行模式,在上电初始时为位置插补模式,并且此时R0.02电机当前位置不为0,在伺服使能后电机会以最高转速运行到P4.12总线位置指令处。为避免这种情况出现,需要上位机在程序初始化时将6060运行模式设为点位模式。 ...
-
英威腾直流电机的速度与实际位置和所需位置之间的差值成正比所以电机接近预设的位置时运行速度将变慢,否则其余时间会运行很快,这也可称之为比例控制调节。因此我们可以认为伺服是一个工作非常高效的小器件。
-
1、输入电源电压过低;2、输入电源缺相;3、电压检测的电路故障;
-
P0.00设为0,上电后报Er05-1检查编码器线,如果出现Er05-1和Er02-c,出厂的编码器没有刷电机参数。
 关于DA200-N通过总线驱动器通过参数0x400014 人气#通用伺服系统
关于DA200-N通过总线驱动器通过参数0x400014 人气#通用伺服系统 DA200-N伺服面板查看故障记录报警代码是Er246 人气#通用伺服系统
DA200-N伺服面板查看故障记录报警代码是Er246 人气#通用伺服系统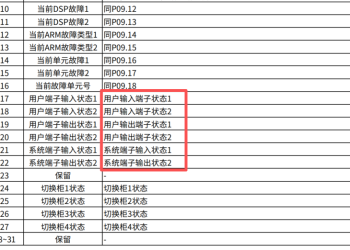 GD5000 profibus DP通信报文给定值和实际值534 人气#高压变频器
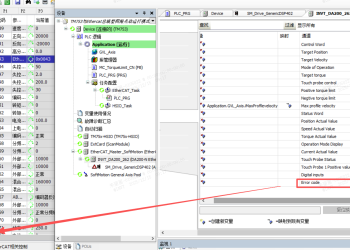
GD5000 profibus DP通信报文给定值和实际值534 人气#高压变频器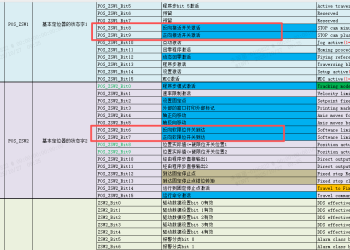 DA200A-F驱动器的111报文如何读取硬件限位1117 人气#通用伺服系统
DA200A-F驱动器的111报文如何读取硬件限位1117 人气#通用伺服系统