-
报警机制:1.所对应的这一相上管或者下管流过较大电流使其导通Vce很大,触发对应的驱动芯片DESAT保护输出故障信号;2.所对应的这一相上管或者下管驱动电压过低导致驱动芯片输出故障信号;3.目前只有DA200系列7.5k ...
-
报警机制:1.驱动器发出开管命令实际制动管却没开;2.驱动器没有发出开管命令但制动管却导通了;3.目前只有DA200系列7.5kW以上中大功率、DA300、DA213有这个功能;DA180、DA212、DA200系列5.5kW以下机型无此功能 ...
-
报警机制:1.驱动器输出电流超过P9.44(驱动器IGBT过载保护值)且维持时间大于P9.45(驱动器IGBT过载保护时间—默认值5ms);2.驱动器输出电流超过P9.72(驱动器过流保护值)且维持时间大于P9.80(驱动器过流保护 ...
-
如果驱动器未使能,电机被负载拖动不会损坏驱动器。如果驱动器使能,电机被拖动反转,直流母线电压到达泄放阈值会通过泄放电阻来起作用。
-
三种情况:第一种在伺服断电情况下因为插拔电机侧编码器插头或者电池原因低于3V欠压,在重新上电后驱动器出现Er02-9提示;第二种因更换驱动器原因,因为原点偏移量清零导致的原点位置变化;第三种情况因为运行工况原 ...
-
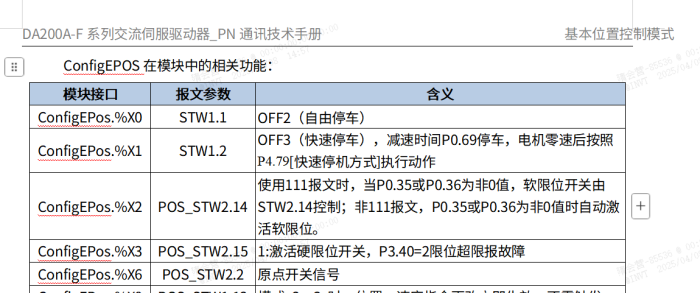
如果上位机没有设定6060运行模式,在上电初始时为位置插补模式,并且此时R0.02电机当前位置不为0,在伺服使能后电机会以最高转速运行到P4.12总线位置指令处。为避免这种情况出现,需要上位机在程序初始化时将6060运 ...
-
通过测试发现编码器初始角出厂未清零引起,重新识别初始角并清零问题解决。
-
出现这种情况,给定脉冲准确说明指令脉冲没有干扰,而反馈位置不一致,一般是滞留脉冲清除引起,这种情况下可以将滞留脉冲清除输入端子定义无效或者加大开关量滤波时间; ...
-
两种方式都可以:1.可以将P0.03设为速度模式,通过端子切换多段速度;2.P0.03还是Ethercat模式,通过6060切换速度模式,P0.40设为内部速度,定义输入端子为多段速,通过端子切换多段速度。 ...
-
软件周期任务重入故障。可以从以下三个方面处理:1.P4.29设为1;2.减少没用PDO;3.是否开启闭环弱磁算法,可以尝试关闭