-
最高5Kw
-
飞机的自动驾驶
-
让电机运行观察一下,R0.51参数实时惯量比,将其数值填到P1.01(第1惯量比),如果还不行调整一下P0.33(位置指令平滑滤波)。
-
请问DA200系列伺服系统可瞬间过载倍数多大?允许持续多长时间?
-
1、分别为P4.31最大速度限制、P4.32超速水平、P8.31电机最高转速。2、当电机超过P4.32超速水平时,伺服会报Er19-0错误,所以这个值要比4.31大200到300转速。3、电机码输入伺服后,三个参数会分别对应输入,以上参数断电重启生效。
-
QDA200系列200VAC驱动器能否接入单相220V电源?1KW及以下功率等级驱动器支持接入单相220V电源;1.5KW及以上,必须接入三相220V电源。因为三相整流出来的直流波形质量更好,输出大功率时母线电压的跌落更少,如果只有单相220V电源,会影响转矩的平稳性、驱动器输出的最大转矩与最大转速。三相电流输入能提供的输入电流更大, ...
-
CW/CCW电机旋转方向前几天还有疑问,伺服的CW/CCW到底是什么鬼。。原来没啥,就是代表电机旋转方向而已,CCW是电机逆时针旋转,CW是顺时针旋转。CW: CLOCKWISE 的缩写,代表顺时针CCW:Counter Clockwise的缩写 ,代表逆时针 ...
-
一个带运动控制功能 一个不带,softmotion带运动控制
-
导弹发射
-
ConfigEPos.%X8,报文参数POS_STW1.12=1,对应得模式 2、3 时,位置、速度指令更改立即生效,不需触发。
-
请问INVT的伺服系统支持正余弦编码器吗?
-
不可以,信号不一样
-
1、 设置合适的惯量比; 2、 提高刚性、增益类参数; 3、 适当增加速度前馈和转矩前馈; 4、P4.28设置为DC模式;
-
伺服上电初始化时,电机有旋转非静止或者编码器干扰反馈,导致初始化不通过,或者运行过程中伺服突然掉电,电机自由运行,然后伺服突然上电,就会报警Er4-0
-
添加pdo或者0x4300 对非周期参数读写操作。
-
1、内部排线接触不良;2.制动管或者其驱动电路异常
-
如果想使用之前版本编程的方式,可以先下载博图V16版本已经压缩的库,然后博图V17版本在全局库添加,升级下即可。
-
1、目前只支持部分参数的PDO映射参数读取,见技术手册; 2、厂家参数P0-P6,R0-R1组支持SDO直接读写 ; 3、其他参数通过SDO访问0x4300,间接操作,见技术手册;
-
对的
-
标准电压的±15%,比如220V系列驱动器可支持187Vac~253Vac,400V系
列驱动器可支持340Vac~460Vac;
 GD5000 profibus DP通信报文给定值和实际值392 人气#高压变频器
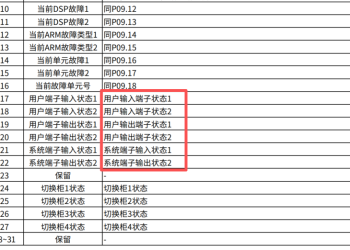
GD5000 profibus DP通信报文给定值和实际值392 人气#高压变频器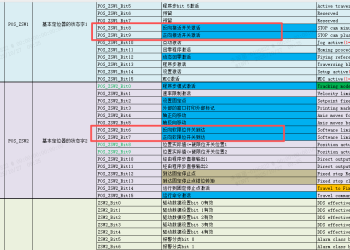 DA200A-F驱动器的111报文如何读取硬件限位1036 人气#通用伺服系统
DA200A-F驱动器的111报文如何读取硬件限位1036 人气#通用伺服系统 谁会搞,付费1368 人气#变频器
谁会搞,付费1368 人气#变频器 GD200A控制面板连锁配电柜4根线被拆,无法1149 人气#低压通用变频器
GD200A控制面板连锁配电柜4根线被拆,无法1149 人气#低压通用变频器