-
因为这款驱动器不支持增量型编码器。
-
EtherCAT故障-退出OP状态
在系统软件关闭或者插拔过网线,在重新连接时提示报警,避免飞车。
-
目前中功率电机出厂时PT1000和KTY84这四根线都引出,默认接的PT1000,因为DA200驱动只支持KTY84,所以需要拔掉那两根黑的PT1000,换成黄绿线KTY84,参数通过P4.45设为120度打开即可。
-
不正常,内部IGBT异常,无法继续使用,更换备机维修处理。
-
已停产停售
-
P0.13设置外接制动电阻功率;P0.14设置外接制动电阻阻值;P4.34设置为2(外接);
-
电机发热从以下方面进行考虑:1、电机持续在高转速下运行,引起铁损增加。2、负载过重,引起铜损铁损持续增加。3、电机的偏置角错误。
-
1、伺服参数,2、上位机组态,3、伺服网线连接。
-
不带的,需要用DA200A- P高配版,支持STO,抱闸输出及动态制动功能。
-
出厂默认的同步周期会自动适应plc周期而更改,可以将p4.43=0x2103更改为0x103即可。
-
一把刀时切刀原点与切刀成180°,两把刀时原点与切刀成90°角度。
-
检查参数P0,01确认电机编码器类型,检查P0.70设置是否正确,检查编码器线,电池盒
-
怎样降低伺服电机的电流声?
-
P4.43=0x102时,60E0、60E1写入才有效。
转矩限制:
正向运行:加速和匀速对应60E0,减速对应60E1
反向运行:加速和匀速对应60E1,减速对应60E0
-
伺服控制模式为0,没有给定模式
-
C=canopen S=485 N=EtherCAT
-
对于伺服电机在运行过程中有较大的电流噪音,可以通过适当降低P4.53【电流环响应微调】参数来进行调整
-
把连接电机的动力线任意两相短一块,用手旋转电机轴看卡顿多少次,就是对应多少级数
-
漏电流
现场产生的漏电流主要有:电机线的漏电流和Y电容的漏电流。电机线的漏电流通常只和电机本身有关;而Y电容是驱动器为了抵御外部干扰、减少自身对外部的干扰,在电源输入对PE之间、母线正负对PE之间放置的一种金属薄膜电容,基于漏电流不能太大考虑,一般是nF级。所以伺服驱动器都不可避免都会有交流漏电流。
C ...
-
检查PLC与伺服末端是否有终端电阻,检查参数是否匹配,检查伺服底层软件是否需要刷新。
 关于DA200-N通过总线驱动器通过参数0x400014 人气#通用伺服系统
关于DA200-N通过总线驱动器通过参数0x400014 人气#通用伺服系统 DA200-N伺服面板查看故障记录报警代码是Er246 人气#通用伺服系统
DA200-N伺服面板查看故障记录报警代码是Er246 人气#通用伺服系统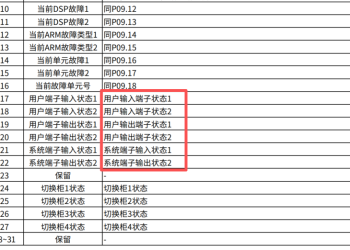 GD5000 profibus DP通信报文给定值和实际值534 人气#高压变频器
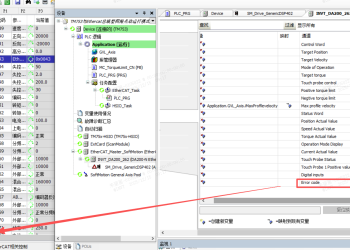
GD5000 profibus DP通信报文给定值和实际值534 人气#高压变频器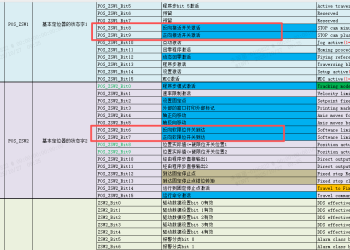 DA200A-F驱动器的111报文如何读取硬件限位1117 人气#通用伺服系统
DA200A-F驱动器的111报文如何读取硬件限位1117 人气#通用伺服系统