-
ER10-4表示急停故障,有急停信号输给驱动器或给驱动器发送了急停命令,接触急停信号/命令即可。
-
刚性可以简单理解为放大倍数,惯量比是负载惯量与电机惯量的比值。刚性越大响应越快,但过大可能引起振荡惯量越大响应的就慢一些,可以理解为惯性的量度。刚性和惯量可以粗略认为是返比关系。建议查询系列伺服手册,学习了解。 ...
-
该问题出现的原因为带第三方电机,且电机动力线较长(40M),并带有屏蔽层,所以导致使能之后电机漏电流较大,而现场使用的漏保开关额定漏电流较小,所以导致漏保开关跳闸,对于该情况,可以使用更大漏电流的漏保开关,或者不使用漏保空开。 ...
-
如果紧急报文这么显示表示伺服控制电源欠压,前两位表示错误代码,中间一位表示错误寄存器,最后五位则是厂家自定义的错误代码
-
如果不接内置制动电阻,按近似5%算;如果有内置制动电阻且需要制动,这个就不好评估,要看实际制动工况有多频繁;如果给不出来制动频繁情况就再多估计一点,按照功率的8%算;举个例子1KW驱动器发热量为80W
-
将P0.22设为0,P0.26设为原P0.22的值,P0.25设为编码器分辨率
-
主要就是接线,脉冲、方向构成回路,设置一下脉冲数或电子齿轮比即可。脉冲控制属于基本应用,伺服手册有详细案例,建议查询手册学习。
-
使用多圈编码器时,运动速度快时,伺服报故障20-0位置超差,4.33位置超差范围已经放大超过10多倍,速度前馈调节也是最大时。设置P4.33为0,可以屏蔽这个报警,只是电机高速定位运行时滞留脉冲会大些,后面只要不出现电机过载报警就可以。 ...
-
大佬们、伺服零点丢了、该怎么搞
-
对于现场干扰较大,或丢脉冲的现场,可将P3.90脉冲输入检测宽度适当降低
-
伺服检测硬件无故障,但伺服的故障记录常见以下故障:1. ER01-0 IGBT故障,ER17-0驱动器过载等过载故障;2. ER02-0,ER02-6/ER02-7 ,ER02-8/ER02-9编码器类故障;3. ER03-0/ ER03-1/ ER03-2,电流传感器检测故障;4. ER07-0 再生放电(制动)过载故障;5. ER13-0 过压故障, ER14-0 欠压等电压类检测故障;6. ER18-0电机过 ...
-
先确认编码器带否电池盒?若没带电池盒,更换带电池盒的线缆;带电池盒:将伺服参数P0.70改为多圈,同时确认PLC-TO编码器组态 G1_XIST1、G1_XIST2均设为0,重新下载PLC硬件,并将伺服参数P4.80/81均改为0,掉电重启。
-
-
有。SV-DA200-00T0系列产品内置电子凸轮功能,支持飞剪、追剪功能,支持三次样条、矢量建表,可手动建凸轮表或通讯下载,支持订单功能、光标捕获功能,虚拟主轴、挺杆输出等功能。
-
QDA200系列手动JOG时电机为什么不转 ?确认伺服驱动器的系统状态处于准备好状态,确认输入电压正常,无故障。伺服处于使能状态,最简单的方法是用手转动电机轴来确认,点动JOG只能在未使能的状态下运行。
-
众所周知,对于伺服控制系统都需要配备速度反馈及位置反馈的编码器,我们在选择编码器时,不仅要考虑编码器的类型,还要考虑编码器的接口、分辨率、精度、防护等级等方面,以满足用户的控制要求。尤其是编码器的分辨率和精度与运动控制有着密切的联系,今天我们就跟大家聊聊伺服编码器的分辨率和精度。分辨率是指编码器每个 ...
-
DA200-F0伺服的上口为Port2,下口为Port1,实际接线上进下出,博途组态PLC直连Port1,组态与实际不符报错
-
伺服电机和步进电机一样,都是靠脉冲来进行定位的。在接收到一个脉冲就会旋转一个对应的角度。伺服电机的精度主要是由电机轴后端的旋转编码器来保证。举个例子,比如说带十七位电机编码器的电机驱动器,每接收131072个脉冲这个电机才能够转一圈。也就是说他走一下,仅仅能够移动0.0027度。那它的精度就是步距角为1.8度的步 ...
-
R0.02是用户单位,R0.13是编码器单位,并没有直接关系
-
ER13-1母线欠压故障报警原理:伺服运行中,直流母线上正极P(+)和负极N(-)之间的电压不足P9.71规定值时,报母线欠压;默认状态下400级驱动器不足350V(直流)报欠压,220V级驱动器不足170V(直流)报欠压;(补充,伺服母线电压不足P9.71时,R0.30系统状态监控显示为上强电,伺服不执行使能指令,不可运行)故障问题处理: ...
 关于DA200-N通过总线驱动器通过参数0x400019 人气#通用伺服系统
关于DA200-N通过总线驱动器通过参数0x400019 人气#通用伺服系统 DA200-N伺服面板查看故障记录报警代码是Er252 人气#通用伺服系统
DA200-N伺服面板查看故障记录报警代码是Er252 人气#通用伺服系统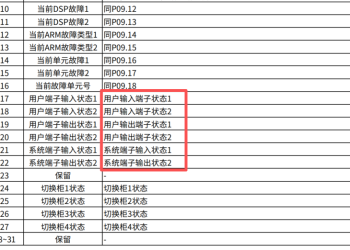 GD5000 profibus DP通信报文给定值和实际值536 人气#高压变频器
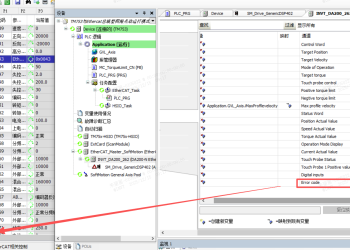
GD5000 profibus DP通信报文给定值和实际值536 人气#高压变频器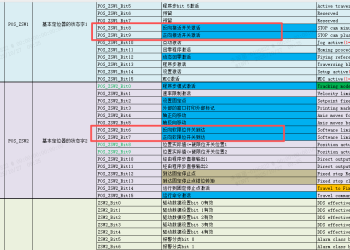 DA200A-F驱动器的111报文如何读取硬件限位1121 人气#通用伺服系统
DA200A-F驱动器的111报文如何读取硬件限位1121 人气#通用伺服系统