-
伺服电机在额定转速之下都是恒扭矩,超过额定转速后扭矩成一定比例下降。备注:扭矩-转速关系具体可见各伺服手册“伺服电机转矩-转速特性”
-
DA180和DA180A CN3接口CNA总线定义不一致
-
不通用
-
Er18-3为电机缺相故障。首先动力线是否断线,其次检查电机线圈是否开路等。如果偶尔出现该故障可以通过P4.77=0屏蔽缺相功能。
-
跳闸分两种情况,上电瞬间跳闸和上电使能后再跳闸;①上电瞬间跳闸:针对小功率5.5kW以下通常是由于并联了多台驱动器一起上电导致,目前可大致按每台4mA算;针对中功率有一个C3滤波器会大幅增加上电漏电流,可拔掉底层白色跳线帽J10;还有可能是因为制动电阻(包括内置和外置)发热厉害烧坏以后导致内部电阻丝膨胀与外壳PE ...
-
支持,接线方式如下图:
-
需要断电从新上电
-
定位轴
-
Er04-0为系统初始化故障,系统上电初始化过程完成后,有自检未通过项,通常为电机上电时电机有转速反馈。检查驱动器上电时是否有外界原因导致电机有转速,检查现场是否有干扰源导致电机静止状态下有转速反馈。
-
可以P5.10=8,P5.14=0,P5.16=0;通过CW控制字触发回原点,当前R0.02会自动清零。PS:这波操作伺服内部在执行回原点时已经关联到P0.71,不需要再对P0.71单独操作。
-
伺服输入接线由于高低电平有效会有不同的输入接线。输出接线只有一种,输出的高低电平有效软件选择后,伺服内部会有一个取反操作的内部处理,输出相当于软件把信号取反,和硬件没关系。接线详见说明书。
-
新联电机15.62/10.78mH
-
针对多圈编码器,检测两种情况,编码器上电初始化时多圈位置不正确会反馈的给驱动器提示,另外一种情况是在运行过程中,振动激烈会反馈给驱动器。编码器故障,驱动器读取编码器出现的,V2.64默认不开启这个错误
-
PZD参数设置超限,注意参数最小值和最大值
-
DA200伺服电机更换编码器后,需要重新学习初始角:设置P4.96[编码器初始角测试] 为2,学习完成后可以查看P8.19[编码器偏置角]。注意:不要带负载测试!!!(电机出轴不能连接任何负载)
-
只有电机,驱动器还是IP20
-
在使用多圈绝对值编码器时,固件ARM版本号2.67及以上,状态字6041回零完成标志位,可以实现掉电保持功能。
-
最多4路信号通道
-
-
已经换型号了。选型查看5.2版本
 关于DA200-N通过总线驱动器通过参数0x400010 人气#通用伺服系统
关于DA200-N通过总线驱动器通过参数0x400010 人气#通用伺服系统 DA200-N伺服面板查看故障记录报警代码是Er244 人气#通用伺服系统
DA200-N伺服面板查看故障记录报警代码是Er244 人气#通用伺服系统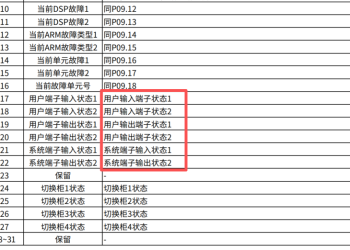 GD5000 profibus DP通信报文给定值和实际值533 人气#高压变频器
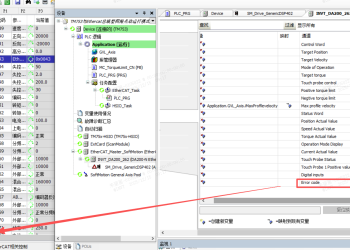
GD5000 profibus DP通信报文给定值和实际值533 人气#高压变频器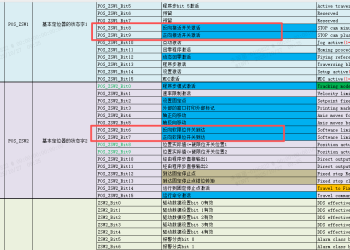 DA200A-F驱动器的111报文如何读取硬件限位1117 人气#通用伺服系统
DA200A-F驱动器的111报文如何读取硬件限位1117 人气#通用伺服系统