-
可能使用了上位机软件默认的2.60版本配置表,与最新伺服固件版本不一致引起。以DA200-E0机型2.64版本为例,使用ServoPlorer上位机时首先重新加载2.64版本配置表。加载成功后,如图所示。配置表可在INVT官网下载。下载完成后,将配置表放在ServoPlorer安装目录下即可。下载地址:http://www.invt.com.cn/service/self-servic ...
-
不可以。伺服驱动器到电机UVW的接法是唯一的。伺服电机UVW任意两相互换电机会反转,伺服电机是有编码器反馈的,这样就出现正反馈会导致电机飞车。 伺服驱动器会检测并防止飞车,因此在UVW接错线后我们看到的现象是电机以很快的速度转过一个角度然后报警飞车故障ER19-4。 另一方面由于伺服驱动器控制都会根据匹配电机有固定 ...
-
先检查电机线缆是否有问题,是否缺相断线的情况,如果没有试着电机空载运行看看,判断是否过载;或空载也报警,在试着用驱动器软件上手动运行,如果还报警时,联系厂家更换。
-
只有带00T0的型号支持伺服内置电子凸轮。
-
可以将两个开关信号功能设为23和24,然后上电使能即可,速度可以通过P6.00和P6.0设定
-
关闭电脑数字签名后再装USB驱动
-
DA200 P0.03设置为1,速度模式1、对驱动器P4.40(modbus地址是1880),赋值正向速度限制。2、对驱动器P4.41(modbus地址是1882),赋值反向速度限制(负值)。3、对驱动器P4.10(modbus地址是1820),赋值为1,总线输入。4、对驱动器P4.11(modbus地址是1822),赋值为1,给使能。5、对驱动器P4.14(modbus地址是1828 ...
-
电机铭牌电机码有误,重新设置电机码后故障消除。
-
设置中功率电机温度的保护阈值(F0机型为P4.43,E0机型为P4.45,其他机型需要使用对应的配置表去设置,同一机型不同软件版本要使用对应软件版本的配置表),设置完成后查看R0.60(中功率电机温度)即为当前的电机温度。
-
将P7.03设置为2:虚拟主动轴模式,设置P7.07:虚拟主轴速度。
-
伺服使能为开关量控制,P3.00改为003后解决。
-
目前不支持
-
检查为CN2接线错误,重新根据说明书接线。
-
Sto-In表示安全输入信号未接入或者电路故障
-
将P4.25EtherCat控制单位类型修改为CIA402 Unit
-
一,13-1 母线欠压故障报警原理: 1.伺服运行中,直流母线上正极P(+)和负极N(-)之间的电压不足P9.71规定值时,报母线欠压;默认状态下380级驱动器不足350V(直流)报欠压,220V级驱动器不足170V(直流)报欠压;(补充,伺服母线电压不足P9.71时,R0.30系统状态监控显示为上强电,伺服不执行使能 ...
-
220V系统欠压保护值是直流170V(对应交流120Vac),400V系统欠压保护值是直流350V(对应交流247.5Vac);过压时不管有没有使能都会报过压故障;220V系统过压保护值是直流400V(对应交流283Vac),400V系统过压保护值是直流800V(对应交流566Vac);制动电阻阻值选得过大或者已经损坏会导致减速时发的电没法消耗导致过压。 ...
-
依据有限的数据在目标点之间以确定的方式完成运动轨迹,比如直线,圆弧等常见形状。
两轴的圆弧插补,就是两个轴联动依据有限的数据在目标点之间以确定的半径等走出圆弧运动轨迹。
-
一, 7-0 再生放电过载报警原理: 1.伺服运行中 ,当母线P.N之间的电压达到P9-76规定的电压值(220V级产品,默认380V;380V级产品,默认780V),刹车IGBT闭合,将刹车电阻接入P.N之间,消耗掉回馈的能量,使P.N间电压恢复至正常范围;当刹车过于频繁,刹车电阻选型过小或电源电压过高,虽开启了IGBT,接 ...
-
故障码含义为“编码器故障-编码器电池低压报警”与“编码器故障-编码器电池欠压故障”。因为如果伺服驱动器的编码器类型选择的是通信式编码器,并且选择为多圈绝对值模式,则驱动器会读取编码器的故障状态。多圈绝对值编码器的电池额定电压为3.6V,欠压报警电压为3.1V左右,欠压故障电压为2.75V左右。请测量电池电压,如果 ...
 关于DA200-N通过总线驱动器通过参数0x400019 人气#通用伺服系统
关于DA200-N通过总线驱动器通过参数0x400019 人气#通用伺服系统 DA200-N伺服面板查看故障记录报警代码是Er252 人气#通用伺服系统
DA200-N伺服面板查看故障记录报警代码是Er252 人气#通用伺服系统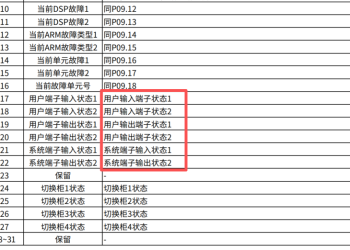 GD5000 profibus DP通信报文给定值和实际值536 人气#高压变频器
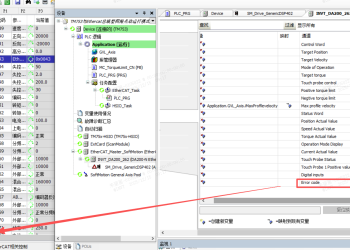
GD5000 profibus DP通信报文给定值和实际值536 人气#高压变频器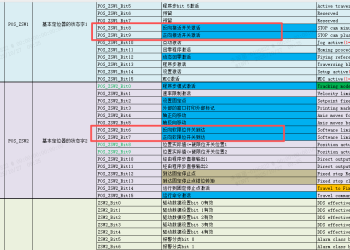 DA200A-F驱动器的111报文如何读取硬件限位1121 人气#通用伺服系统
DA200A-F驱动器的111报文如何读取硬件限位1121 人气#通用伺服系统